Китайская компания DJI – давний и успешный игрок на международном рынке дронов. Квадрокоптеры и другие дроны, выпускаемые компанией, очень популярны во всем мире. Модельный ряд квадрокоптеров включает аппараты от любительских до профессиональных. Несмотря на то, что цены на квадрокоптеры DJI колеблются в довольно широких пределах и каждый может приобрести хотя бы любительскую модель, есть немало желающих создать квадрокоптер своими руками.
Как построить свой собственный квадрокоптер
Китайская компания DJI давно и успешно осваивает международный рынок беспилотных летательных аппаратов. Квадрокоптер и другие дроны этой компании очень популярны во всем мире. Ассортимент квадрокоптеров достаточно широк – от любительских до профессиональных аппаратов. Хотя цены на квадрокоптеры DJI варьируются в широком диапазоне и каждый может приобрести хотя бы любительскую модель, есть много желающих построить свой собственный квадрокоптер.
Расчетное время полета на полной передаче составляет уже около 22 минут, а время зависания приближается к 30 минутам. В действительности эти расчеты дают лишь приблизительное время полета. В теории, в первой конфигурации, расчетное время полета составляет 11 минут, но на практике оно составляет 16 минут, а время зависания – 19 минут, до звукового сигнала, когда один из элементов батареи достигает 3,4 вольта под нагрузкой. И обратите внимание, что нагрузка на батарею составляет всего 6,76C. Другими словами, чем выше емкость батареи, тем меньше нужно обращать внимание на это число. Я бы даже сказал, что лучше, если это число не будет находиться в диапазоне 30-40, потому что этот параметр будет влиять только на вес батареи. Если расчетная нагрузка имеет запас почти в полтора раза, а пиковая нагрузка батареи обычно почти вдвое превышает заявленный параметр длительной нагрузки (10-20C) (30-45C), то нет смысла покупать более дорогую и тяжелую батарею.
Но если вы хотите построить настоящий самолет с большой грузоподъемностью, вам понадобятся мощные низкоскоростные двигатели, такие как SunnySky kv380, и аккумулятор 6S.
Многовинтовые двигатели: от расчетов до полета. Все, что вам нужно знать, чтобы построить свой собственный квадрокоптер!

Привет всем! После публикации первого видео, сделанного с помощью собранного мной гексакоптера, люди начали задавать вопросы и просить помощи в сборке аппарата.
Сегодня нет недостатка в информации – наоборот, ее слишком много, которую очень трудно фильтровать.

В своей статье я хочу ответить на вопросы, которые я получаю почти каждый день от знакомых мне людей.
А именно:
– Какой коптер лучше и в чем разница между ними? (квадро-, три-, гекса-, октакоптер)
– Купить готовое или построить самому?
– Какие аксессуары выбрать? Как его рассчитать? Каков минимальный набор для полета?
– Что использовать для съемки – GoPro или более тяжелую камеру?
Думаю, этих вопросов достаточно, чтобы вскипели мозги у тех, в чьих головах пока только желание понять основы, но нет опыта.
Пожалуйста, не воспринимайте все, что я написал, как единственную истину. Я просто хочу уточнить, что я человек с творческо-техническим складом ума, но я не живу в своем ограниченном мире коптеростроения. Напротив, я новичок в этой теме и пишу эту статью, так как, начав мечтать о создании дрона для аэрофотосъемки, столкнулся с множеством различных мнений, и было очень трудно выбрать правильный путь. Мой первый опыт был не совсем удачным, и я хочу предостеречь всех от этого, выделив самое важное и сосредоточившись на важных деталях, о которых мало говорят.
Так в чем же разница между квадрокоптерами и как они называются? Квадрокоптер – это квадрокоптер. Этот тип БПЛА (беспилотных летательных аппаратов), безусловно, является самым распространенным и уже стал привычным, когда речь заходит о многороторных системах. Самый известный четырехмоторный дрон был выпущен компанией DJI, о нем слышали почти все. Это Фантом. Но разбирать все модификации бессмысленно. Я лишь надеюсь, что после прочтения этой статьи вы сможете рассчитать параметры и понять, почему время полета между Фантомами первого и второго поколения увеличилось почти вдвое.
Гексакоптер – это шестимоторный аппарат, а октакоптер – восьмимоторный. Существуют также трикоптеры и так называемые “трехкрылые”. коаксиальный. Существует много споров о том, следует ли называть аппарат с восемью двигателями, но четырьмя лучами, коаксиальным квадрокоптером или октакоптером. Двигатели расположены на одной оси один над другим. У такого расположения есть одно преимущество – размер. Однако на практике те же 8 двигателей в октакоптере дают более высокую производительность, чем установка парных двигателей на одной оси.

Как вы понимаете, вся разница в количестве винтов, в первую очередь, влияет на подъемную силу и устойчивость самолета. Поэтому логично, что маленький квадрокоптер будет бороться с ветром гораздо сильнее, чем большой октакоптер. Во-первых, больший вес сложнее перемещать, а во-вторых, большая длина кронштейна (балки рамы, на конце которой крепится двигатель с пропеллером) предполагает, что один и тот же порыв ветра способен наклонить более крупное устройство под меньшим углом к горизонту. Следовательно, многомоторные системы более устойчивы к самым неблагоприятным погодным условиям.
Я хотел бы затронуть еще одну тему – основы понимания физики поведения мультикоптера. Эти транспортные средства легче освоить, чем любые другие летающие модели: самолеты, вертолеты, планеры и т.д. Для управления коптером необходимо как минимум 4 канала управления.
Канал 1 – элероны – этот канал отвечает за направление влево-вправо.
Канал 2 – подъемный – это канал, который отвечает за движение вперед и назад.
Канал 3 – дроссель – канал дроссельной заслонки. Этот канал отвечает за подъем и спуск с высоты.
Канал 4 – руль – Этот канал отвечает за поворот вокруг собственной оси.
Другие каналы в аппаратуре (моделисты любят использовать слово “аппа” – это передатчик в руках “пилота” и приемник на борту аппарата) используются для управления осями подвеса камеры, для складывания шасси, для управления уровнем чувствительности аппарата к внешним условиям (параметры ПИД в полетном контроллере, которые отвечают за силу и скорость реакции коптера на управляющие сигналы, устойчивость к погодным условиям), для переключения режимов полета (например, GPS, Attitude, Manual, Failsafe, Home lock, Course Lock). Как говорят опытные авиамоделисты, невозможно иметь много каналов, поэтому они следуют одному важному правилу – покупают хорошие, проверенные и брендированные приложения. Лучшими брендами считаются: Futaba, Spectrum, JR.

Время летит, поэтому я добавляю свежие строки к статьям, актуальным сегодня, спустя несколько лет после написания статьи. Я буду выделять их курсивом и добавлять ссылки на примеры компонентов из проверенных магазинов, в которых я покупал.
Из бюджетного, но проверенного оборудования для управления популярностью пользуется FRSky Taranis Q X7. И старший брат – FRSky Taranis X9D Plus.
Одно и то же хорошее оборудование может хранить настройки для десятков моделей одновременно. Поэтому, купив его, вы можете использовать его практически всю жизнь и летать на RC самолетах, вертолетах, машинах, мультикоптерах, просто выбрав нужную вам модель в меню (но для каждой модели придется вручную устанавливать настройки). Так для чего же люди используют дополнительные каналы на практике? Если вы планируете снимать с воздуха, вам необходимо как минимум 2 канала для управления подвесом по трем осям – канал YAW отвечает за рысканье (вращение вокруг вертикальной оси, горизонтальное панорамирование), PITCH – канал pitch, то есть наклон камеры вверх/вниз. Как правило, наклон ROLL не является необходимым, поскольку трудно представить ситуацию, в которой горизонт должен быть намеренно наклонен в фильме. Иногда используется дополнительная направленная камера с сервоприводом, которая может использоваться для управления движениями головы. Лично я реализовал такой контроль над подвесом с помощью камеры GoPro, которая является одновременно направленной и основной камерой. Для этого в видеоочки или шлем FPV (вид от первого лица) устанавливается датчик трекера головы, который подключается к аппаратуре управления, которая в свою очередь передает сигналы на каналы, управляющие нужными осями подвеса камеры. Для дополнительных каналов управления можно придумать и другие применения: от сбрасывания предметов, переносимых коптером, до поджигания фитиля установленной петарды – все ограничивается только воображением.
_
Также важно понимать, как работает мультикоптер в целом. Очевидно, что при перемещении ручки газа вверх на блоке управления коптер просто включает все двигатели и набирает высоту. Для бокового полета коптер наклоняется в правую сторону, увеличивая обороты двигателя с одной стороны и уменьшая с другой. В то же время, благодаря датчикам, подключенным к компьютеру (полетному контроллеру), автомобиль кренится только на угол, ограниченный в прошивке контроллера, чтобы не упасть. Вперед и назад он летит по одному и тому же принципу. Но вращение вокруг собственной оси происходит потому, что двигатели вращаются в противоположных направлениях, и пропеллеры должны совпадать – один скребет воздух под собой, вращаясь по часовой стрелке, другой – против часовой. Поэтому, чтобы заставить самолет повернуть в нужном направлении, он увеличивает обороты двигателей, вращающихся в одном направлении, и уменьшает обороты двигателей, вращающихся в противоположном направлении, в точно такой же пропорции.
_
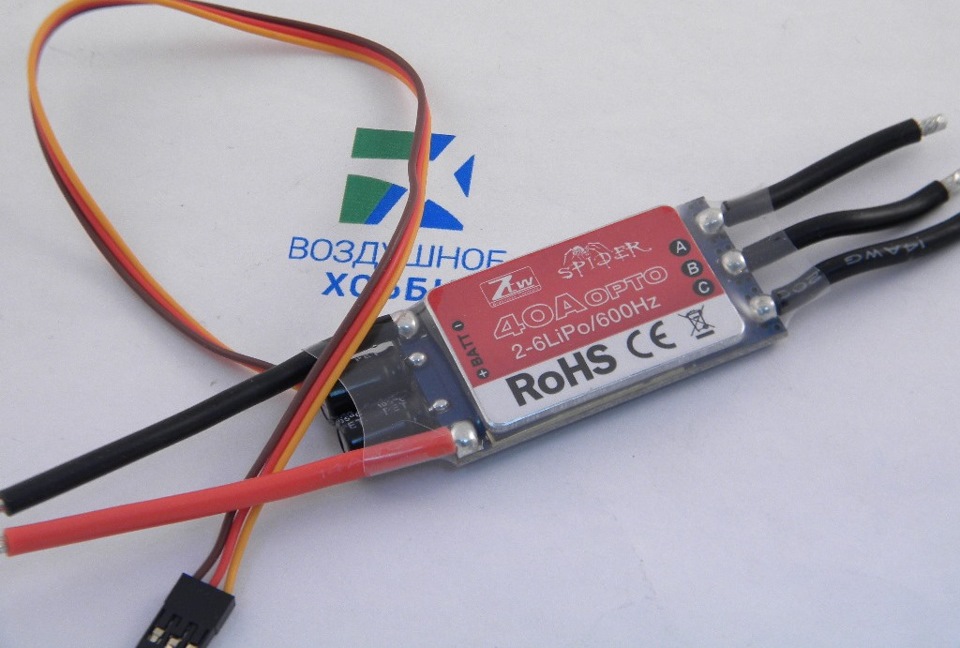
Что касается “начинки”, то мультикоптер состоит из рамы, на которой установлены двигатели. Сигналы на поворот двигателей поступают от полетного контроллера (ПК), но мощности этих сигналов недостаточно, поэтому перед каждым двигателем стоит регулятор скорости (на разговорном языке – “регулятор”, ESC).
На борту также имеется приемник управляющих сигналовкоторый передает их на компьютер.

Современные полетные контроллеры, такие как широко популярный DJI Naza-m v2, представляют собой целые комплекты.

Контроллер уже имеет виброразвязку, поэтому его не нужно помещать на демпфирующую прокладку, а следует прикрепить непосредственно к корпусу. Он также оснащен гироскопическим и барометрическим датчиками, магнитометром, компасом и дополнительным модулем GPS, чтобы транспортное средство могло самостоятельно вернуться в исходную точку при потере связи с аппаратом управления, но это не единственная его особенность. Полетный контроллер оснащен модулем PMU и светодиодным модулем. Также можно подключить модуль bluetooth и телеметрию OSD. На борту также имеется батарея для питания всей системы, и может быть дополнительная батарея для управления приемником. Этот полетный контроллер устанавливается на современные квадрокоптеры DJI Phantom 2, но его возможности выходят далеко за рамки этого небольшого устройства.
На фото выше – минимальный набор того, что можно назвать мультикоптером. Он может взлететь, если есть “аппа”, но этого недостаточно для создания видео. Я пишу это потому, что многие люди, узнав бюджет всей моей машины с камерой и дополнительным оборудованием, удивляются и спрашивают, почему я не купил за эту сумму готовую, более серьезную машину. Ответ заключается в том, что дополнительное оборудование для управления, съемки, стабилизации и мониторинга стоит гораздо дороже, чем сам мультикоптер.
Но стоит ли строить его самому или купить готовый? Вы сами ответите на этот вопрос, прочитав всю статью и ознакомившись с плюсами и минусами. Как я уже писал, многие критикуют меня за то, что я потратил много денег на создание устройства, которое фактически делает то же самое, что и DJI Phantom 2. Сумма со всеми дополнениями достигает 200 тысяч рублей. Добавьте к этому стоимость блока управления Futaba 10J с заводским режимом мультикоптера, в паре с родным передатчиком, который работает на расстоянии до 4 км и имеет очень хорошую помехозащищенность. В комплект входили камера GoPro 4 black, риг Fy-G3, очень мощный FPV-передатчик и приемник 1000 мВт 1,2 ГГц с изготовленными на заказ антеннами “клевер”, покрывающими расстояние до 12 км, и фильтром для отсечения частот, наиболее влияющих на блок управления, чтобы случайно не засорить сигнал приемника. В эту сумму также входит FPV-видеошлем eYebox с потрясающей цветопередачей, детализацией и углом обзора (а до этого были очки Fatshark BASE SD, которые мне не понравились по сравнению со шлемом и я решил их продать).
Говоря о вопросе покупки готового устройства, ответ однозначен – покупайте проверенное, если вы намерены использовать его только для того, для чего оно предназначено. Так, если Phantom 2 будет нести GoPro, вы не повесите на него DSLR, вы не увеличите время полета, максимум из него выжмут очень грамотные техники.
Построить коптер самостоятельно – это выбор людей, которые любят решать сложные задачи. Другими словами, люди, которые получают удовольствие от процесса расчета и сборки. Преимущество самосборной машины в том, что ее можно расширить и прикрепить к ней любое дополнительное оборудование. Однако важно понимать, что аппарат предварительно рассчитан на определенный вес и время полета. Но запас хода, так сказать, может привести к катастрофическим последствиям.
Конфигурация моего текущего гексакоптера следующая:
1. рама: tarot fy-680.
2.Контроллер: dji naza-m v2 gps.
3.Motors: sunnysky v3508 kv580.
4.Контроллеры: Hobbywing Platinum PRO 30A OPTO ESC (2-6s).
Пропеллеры: карбон 1255.
6. батареи: lipo 4S turnigy 5000 mah 30-45C и 8000 mah 20-30 C (500 и 800 грамм).
7. пульт управления и приемник: Futaba 10J.
8. подвес для gopro3 : Feiyu Tech fy G3 gimbal.
9. экранная телеметрия DJI iOSD mini.
10.Трансформатор BAC с выходом 5 В для питания камеры во время полета.
Собственный вес без батареи составляет 2600 грамм.
Изначально была немного другая конфигурация. Он летал на батареях 3S, моторах sunnysky 2216 kv800 и пропеллерах 1045 и 1238 (1238 был отправлен продавцом по ошибке).
Если вы решили построить свой собственный мультикоптер, я постараюсь объяснить основные принципы. Важно сразу понять, каким будет собственный вес устройства, и на основании этого произвести расчеты. Готовые конфигурации можно найти на форумах и перепроверить на специальном калькуляторе, о котором я расскажу позже. Еще один важный момент – этот калькулятор не знает, возможно ли физически установить пропеллеры нужного размера на вашу раму и можно ли их установить на сконфигурированные вами двигатели.
1 Итак, первое, что необходимо сделать, это определить вашу раму, ее вес и максимальный размер пропеллеров, которые могут быть установлены.
2. При выборе двигателей ознакомьтесь на сайте производителя с таблицами рекомендуемых гребных винтов. Например, я использую следующие двигатели SunnySky v3508 kv580
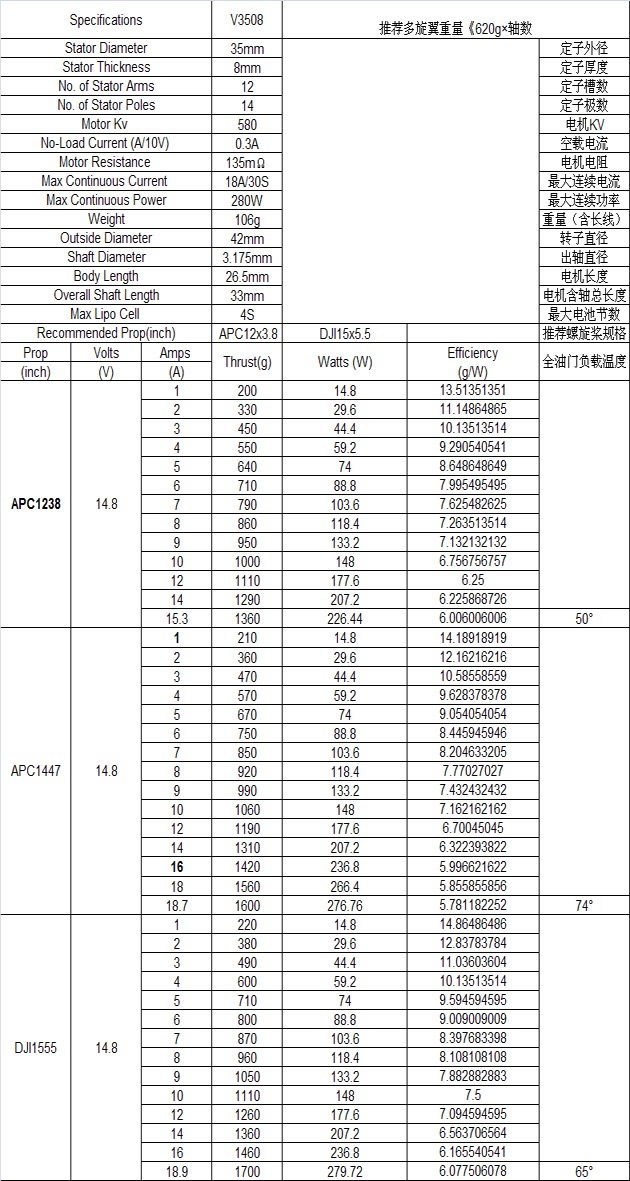
И здесь я хотел бы остановиться на параметрах двигателя. Название двигателя кодирует его основные параметры V3508 kv580, где v – серия, 35 мм – диаметр статора, 8 мм – длина статора. Параметр KV говорит нам об оптимальной скорости вращения самолета для данного двигателя. Это означает, что, учитывая оптимальную скорость вращения и вес самолета, мы должны выбрать пропеллеры с необходимыми параметрами для достижения оптимальных характеристик. В таблице видно, что производитель рекомендует 3 типа гребных винтов для этих двигателей: 1238, 1447 и 1555. Во втором столбце видно, что значение напряжения везде равно 14,8 В. Это означает, что эти моторы используются только с батареями 4S. Для одинаковых моторов на графике могут быть указаны разные напряжения, поэтому будьте внимательны, моторы, работающие с батареями 11.1V 3S и 14.8V 4S, обычно допускают меньшие шапки пропеллеров с батареями 3S, чем с 4S, так как мотору может не хватить мощности для управления тяжелым для него вертолетом, и возможно, что вертолет будет летать вверх ногами уже в воздухе. (Это случилось со мной). Вот пример таблицы для двигателей SunnySky 2216 kv800
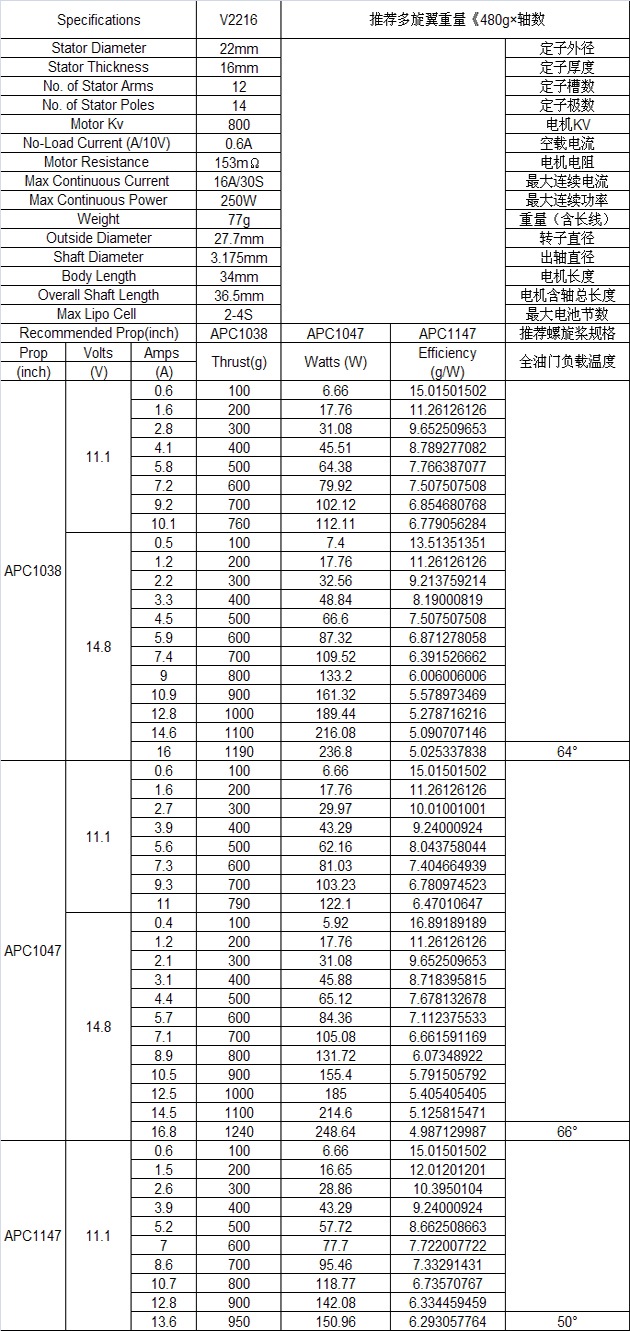
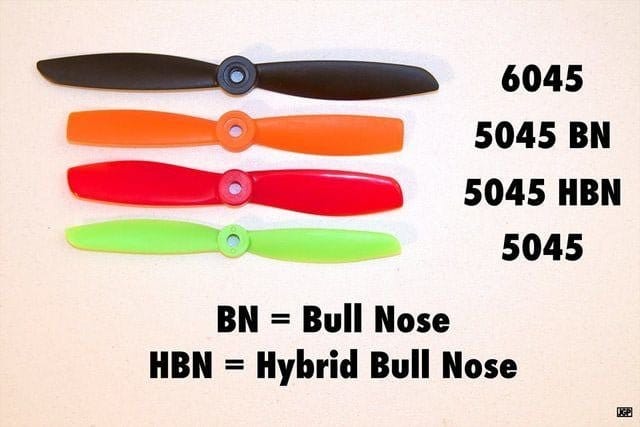
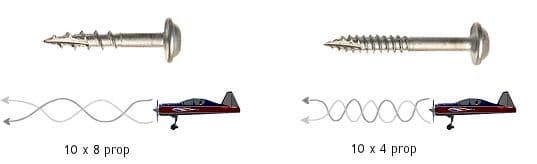
Из этой таблицы видно, что при использовании двигателей 2216 с батареями 11,1 вольт можно разместить максимум 1147 пропеллеров, а с батареями 14,8 вольт – максимум 1047 пропеллеров. Теперь, чтобы собрать эту картину воедино, стоит объяснить маркировку на пропеллерах. На самом деле, размер означает только первое двузначное число, а второе число – шаг. Размеры указаны в дюймах. Обозначение 1047 означает, что гребные винты имеют размер 10″, а шаг на оборот составляет 4,7″.
Выше я уже приводил ссылку на видео с моим первым случаем, когда я установил пропеллеры 1238 на двигатели 2216 kv800. На видео можно увидеть с 17-й секунды, что машина начинает подниматься, когда дует или падает ветер. В итоге коптер перевернулся в воздухе и упал вверх тормашками на тротуар. Во-первых, двигатели перегреваются и могут сгореть в полете, а во-вторых, им банально не хватает мощности для резкого вращения пропеллеров, необходимых для стабилизации положения коптера, в результате чего аппарат раскачивается все сильнее и сильнее.
Кроме того, прежде чем приступить к расчетам, важно расширить свои знания о литий-полимерных батареях. Сейчас они встречаются повсюду – в телефонах, планшетах, ноутбуках и других устройствах. Эти батареи обладают наибольшей емкостью относительно своего веса и наибольшей токоемкостью при минимальном времени зарядки. Однако батарейки токсичны и даже взрывоопасны.
Они неизменно взрываются в случае серьезного механического повреждения, перезарядки или короткого замыкания. Эту информацию важно знать и в том случае, если вы не планируете строить свой собственный коптер.
Литий-полимерные аккумуляторы должны заряжаться, транспортироваться и храниться в специальных огнеупорных конвертах.

Теперь давайте разберем параметры, содержащиеся в описании батареи.

Например
ONBO 5200mAh 4S 45C Lipo Pack:
– Емкость: 5200 мАч
– Напряжение: 4S1P / 4 ячейки / 14,8 В
– Разрядный ток: 45C непрерывный / 90C пиковый
– Вес: 485 г (включая провода, разъемы и корпус)
– Размеры: 160x50x32 мм
– Балансный разъем: JST-XH
– Разъем питания: Т-образный разъем
Так что же означают эти 2S, 3S, 4S? 6S и что они означают?
Параметр S указывает на количество ячеек, или банок. Каждый элемент представляет собой отдельный аккумулятор с определенной емкостью, но его номинальное напряжение составляет 3,7 В, а напряжение полностью заряженного элемента – 4,2 В. Поэтому номинальное и полное напряжение батареи 2S составляет 7,4-8,4 В, 3S – 11,1-12,6 В, 4S – 14,8-16,8 В и т.д.
Батарея имеет балансировочный разъем, к которому может быть подключен индикатор напряжения для контроля как общего заряда батареи, так и уровня заряда отдельных элементов.

Такой индикатор настроен на определенный уровень напряжения, и при его достижении в любой из ячеек он начинает сигнализировать громким звуковым сигналом. Это очень полезно, если вы отправляете блок с устройством, настроенным на напряжение 3,4 вольта. Чтобы понять, что пора сажать коптер. В конце концов, вы должны знать, что порог, до которого можно разрядить Li-Po аккумулятор, чтобы он прослужил долго, составляет 3,3 вольта на банку. Когда аккумулятор полностью разряжен, он теряет большую часть своей емкости.
А чтобы правильно зарядить его, необходимо специальное зарядное устройство, способное сбалансировать напряжение в ячейках и в то же время не перезарядить его, чтобы он не загорелся.

Такое зарядное устройство также способно заряжать (или разряжать) до номинального напряжения для хранения батареи, поскольку хранение полностью заряженных батарей также негативно сказывается на сроке их службы.
Возвращаясь к описанию параметров батареи, я бы хотел разбить на части параметр “C” – обычно это числа 10C, 20C, 30C и т.д. Этот параметр равен емкости ячейки. Грубо говоря, 1С – 5000 mah – это 5А за 1 час, и если батарея с током разряда 20С способна полностью разрядить свой заряд в 20 раз быстрее, чем за 1 час, то есть за 3 минуты. Но в то же время рекомендуемый зарядный ток для большинства батарей не должен превышать 1С. Однако максимальный зарядный ток указан в техническом паспорте каждой батареи. Но лучшим и более щадящим способом зарядки является 1С, то есть, если емкость батареи составляет 2000 mah, ее следует заряжать током не более 2 ампер. А если емкость батареи 4000 mah, то та же 1С для такой батареи уже даст 4 ампера.
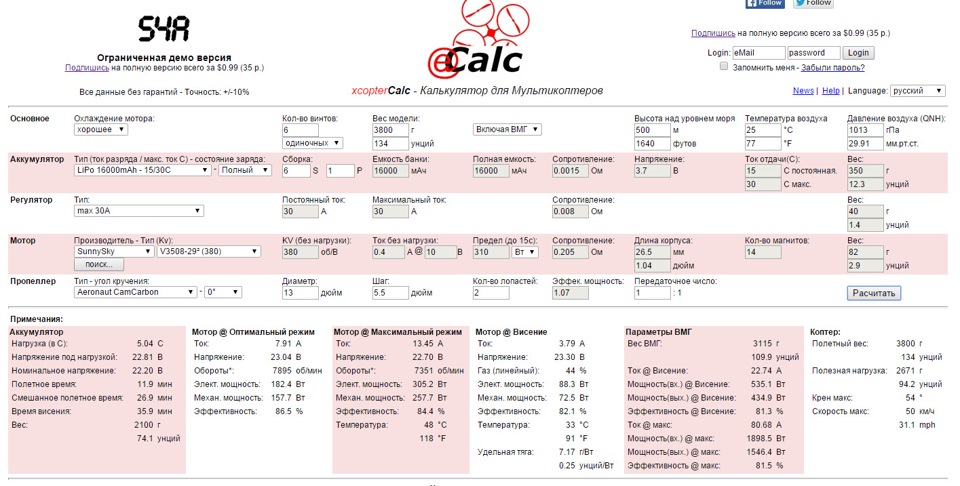
Если вы уже освоили всю эту теорию, то вот самое интересное. Давайте узнаем, как пользоваться калькулятором мультикоптера.
Сразу скажу, что она “буржуазная”, поэтому требует взноса. Но мы россияне, поэтому есть легальный способ использовать все возможности этого ресурса без финансовых вложений. Он включает перезагрузку страницы, если мы не находим нужные нам двигатели или аккумуляторы в базе данных. Каждый раз, когда вы возвращаетесь, база данных обновляется. Однако я могу добавить, что многие двигатели являются аналогами, поэтому вы можете выбрать двигатель другого производителя с такими же размерами и параметром KV.
Вот пример моей конфигурации в полном снаряжении:
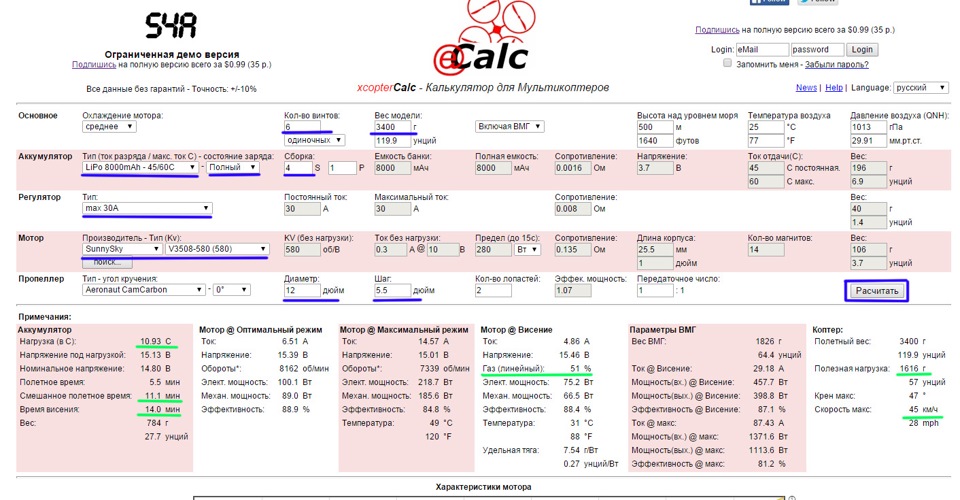
Синим цветом я выделил параметры, которые я изменил в таблице по сравнению с настройками по умолчанию при загрузке страницы, а зеленым – наиболее важные строки, на которые следует обратить особое внимание при расчете. Как вы можете видеть, ховер-газ отрегулирован почти идеально. Для полетного контроллера naza рекомендуется выбирать значения между 40% и 60%. Парящий дроссель не означает, что если вы оставите дроссельный рычаг ровно наполовину поднятым, мультикоптер будет подниматься, если дросселя слишком много, или снижаться, если дросселя недостаточно. Нет, на самом деле полетный контроллер сам регулирует обороты двигателя, чтобы оставаться на заданной высоте при положении ручки газа точно посередине. Однако, если дроссель превышает 60%, лодка перегружена, и вам следует попробовать использовать гребные винты большего шага или большего размера (если позволяют характеристики рамы и двигателя).
В качестве примера я рассчитал ту же конфигурацию с 1447 пропеллерами.
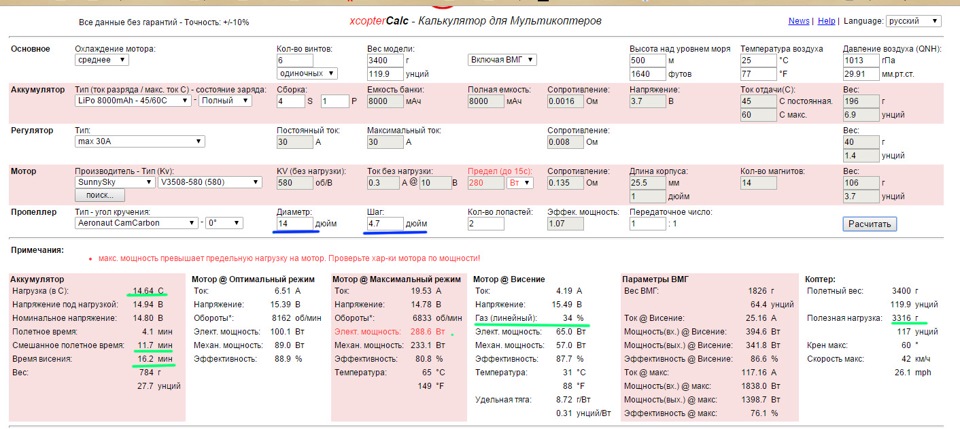
Мы видим, что очень незначительное увеличение времени полета оказало заметное влияние на нагрузку батареи, которая увеличилась с 11C до 15C, и на нагрузку двигателя. В максимальном режиме он даже отображает предупреждение о том, что нагрузка превысила предел. Но в то же время полезная нагрузка увеличилась почти вдвое, а парящий газ снизился до 34%, поэтому возник небольшой избыток тяги. Такая конфигурация подойдет, если я захочу установить на коптер камеру типа Panasonic GH4K или sony nex вместо GoPro. Но тогда время полета значительно сократится, потому что вес увеличится. Для полетов с такими камерами я сделаю расчеты в конце, а пока приведу пример, если мы используем аккумулятор большой емкости 16000 mah для той же конфигурации. Он весит 1 кг (10С) и стоит относительно недорого – сегодня его можно купить за 7300 руб. с доставкой по РФ. Но пропеллеры в расчете уже не 1255, а 1355, потому что вес машины увеличится.
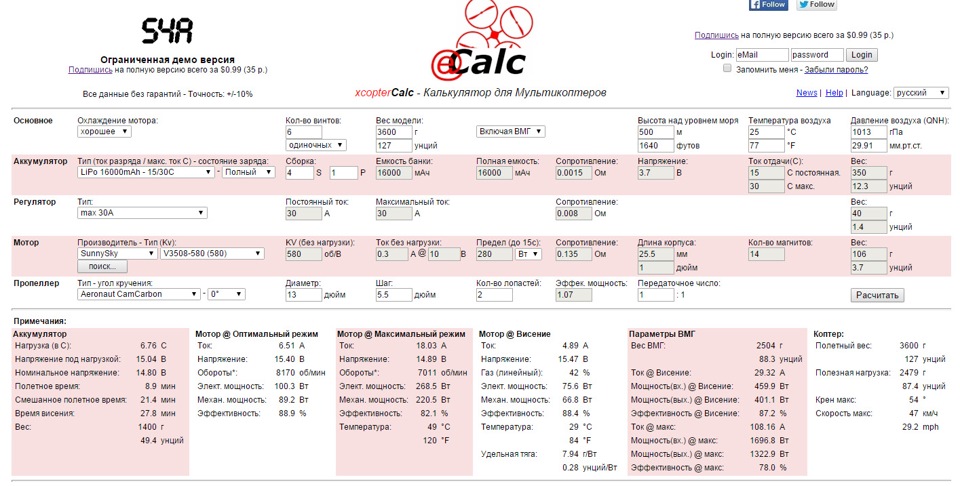
Расчетное время полета на полной передаче составляет уже около 22 минут, а время зависания приближается к 30 минутам. В действительности эти расчеты дают лишь приблизительное время полета. Теоретически в первой конфигурации расчетное время полета составляет 11 минут, но на практике оно составляет 16 минут, а время зависания – 19 минут, до звукового сигнала, когда один из элементов батареи достигает 3,4 В под нагрузкой. И обратите внимание, что нагрузка на батарею составляет всего 6,76C. Другими словами, чем выше емкость батареи, тем меньше нужно обращать внимание на это число. Я бы даже сказал, что лучше, если это число не будет находиться в диапазоне 30-40, потому что этот параметр будет влиять только на вес батареи. Если расчетная нагрузка имеет запас почти в полтора раза, а пиковая нагрузка батареи обычно почти вдвое превышает заявленный параметр длительной нагрузки (10-20C) (30-45C), то нет смысла покупать более дорогую и тяжелую батарею.
Если вы хотите построить настоящий “лонглоадер” с приводом нагрузки, вам нужны мощные низкоскоростные моторы, такие как SunnySky kv380, и аккумулятор 6S.
Что касается широко известного DJI Phantom 2, то его полетный вес составляет 1400 грамм, моторы dji 2312 kv960 (первый “фантом” 2212 kv920), пропеллеры 9450 (первый 9443), аккумулятор 3S 5200 mah (первый 2200 mah), регуляторы около 20 ампер. Думаю, вам будет интересно посчитать и понять для себя, каким будет время полета и другие параметры, если к готовому 200 граммовому FPV комплекту добавить: видеопередатчик, антенну и бортовой 2S-3S аккумулятор. Сразу скажу, что среднее время полета сократится на 5-7 минут. Но 200 грамм для гексакоптера менее важны. Кроме того, многие задаются вопросом, есть ли смысл и даже проводят дорогостоящие бессмысленные эксперименты без расчетов, устанавливая под балки Phantom две неоригинальные батареи большей емкости вместо одной оригинальной. Это абсолютно бессмысленно, поскольку запас хода у таких устройств очень мал. Теперь, когда вы знаете, как пользоваться калькулятором, я предлагаю вам выполнить расчеты самостоятельно.

Надеюсь, моя статья будет вам полезна. Что касается покупки деталей и запчастей для сборки, я использую известные зарубежные торговые площадки ebay и aliexpress, hbbyking и им подобные.
Значение KV двигателя указывает на скорость, с которой двигатель будет вращаться при подаче 1 вольта на его обмотки. Она зависит от количества витков медного провода в статоре двигателя и магнитной силы магнитов.
Как сделать квадрокоптер




Мастер давно увлекается авиамоделированием. Сначала это были модели самолетов, затем квадрокоптеры. В этой статье мастер расскажет, какие материалы выбрать для постройки квадрокоптера и как сделать раму из фанеры. Давайте посмотрим короткое демонстрационное видео.
Для изготовления квадрокоптера мастер использовал следующие предметы
Инструменты и материалы:
-Березовая фанера;
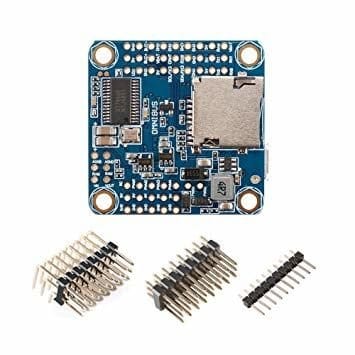
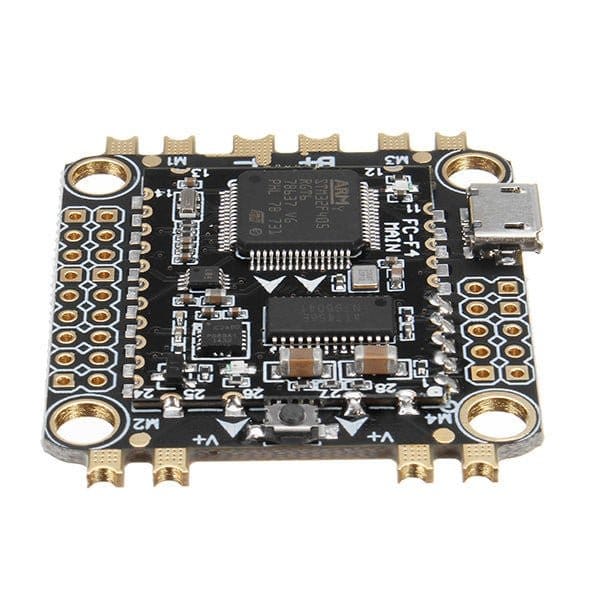
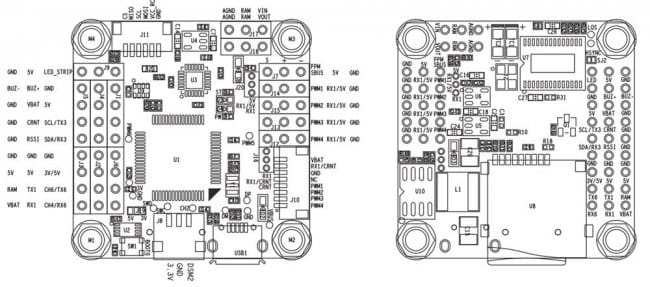
-контроллер Omnibus F4, SP Racing F3;
-Распределительная плата питания Mateck;
-HGLRC 28A BLHeli ESC контроллер – 4 шт;
-Мотор Racestar BR2204 2600Kv Racing Edition – 4 шт;
-Кингконг 5X4X3 пропеллеры – 4 шт;
-FIlsky TH9X радиомодуль с приемником
-Батарея Gens 3800 мАч
-Подставки – 16 шт;
винты -M3;
-Шуруповерт
Отвертка; -Паяльные принадлежности;
-Нож;
-Разрез;
Шаг первый: выбор материала
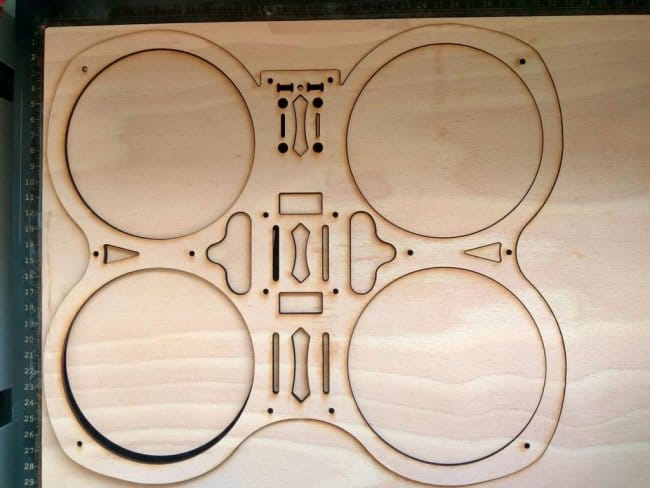
Рама.
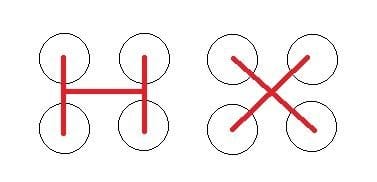
Обычно рама изготавливается из легких и жестких элементов, таких как стекловолокно, углепластик, дерево, алюминий и т.д. Существует множество различных типов рам, мастер изготовит раму под четыре двигателя.
Такие рамы бывают в основном H-формы или X-формы. X-form – это хороший баланс между устойчивостью и маневренностью. Это кадр, который сделает мастер.


Двигатели.
Существует два типа двигателей: коллекторные и безмоторные. В большинстве квадрокоптеров используются бесщеточные двигатели, которые могут очень быстро реагировать на изменения числа оборотов и крутящего момента. Для бесщеточных двигателей требуется специальный электронный регулятор скорости (ESC).
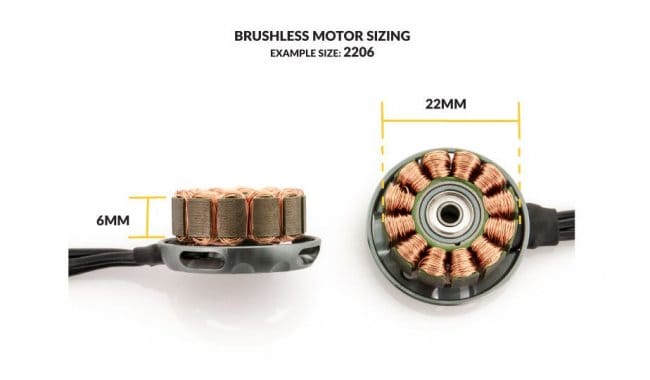
Размер бесщеточных двигателей обозначается четырехзначным числом – AABB. “AA” указывает ширину статора, а “BB” – высоту или диаметр статора, оба в мм (миллиметрах). Например, Racestar BR2205 имеет диаметр статора приблизительно 22 мм и высоту статора приблизительно 05 мм.
В целом, чем выше статор, тем больше мощность на высоких скоростях, а чем шире статор, тем больше крутящий момент на низких скоростях.
Значение KV двигателя указывает на скорость, с которой двигатель будет вращаться при подаче на его обмотки напряжения 1 В. Она зависит от количества витков медного провода в статоре двигателя и магнитной силы магнитов.
Меньшее количество витков означает меньшее сопротивление и, следовательно, более высокую скорость. Поэтому двигатели с более высоким KV, как правило, имеют меньшие обмотки статора.
KV определяет, какой винт можно использовать с двигателем. Чем ниже KV, тем больше винтов может вращаться, и наоборот. Вы не сможете увеличить подъемную силу, установив пропеллер большего размера на двигатель с более высоким КВ, потому что требования к крутящему моменту будут выходить за пределы допустимого, и двигатель будет перегреваться.
Например: двигатели 2600 кВ BR2205 могут работать с пропеллерами 5×4 дюйма, а двигатели 1000 кВ BR2212 могут работать с пропеллерами 10×4,5 дюйма.
KV ни в коем случае не является показателем мощности двигателя, двигатели с большим KV не обязательно мощнее двигателей с меньшим KV.


Электронные регуляторы скорости (ESC).
Последние достижения в области мини квадрокоптеров стали возможны благодаря появлению небольших электронных регуляторов скорости, которые позволяют работать с двигателями без коммутатора. Электронные регуляторы скорости работают, получая сигнал от полетного контроллера и поддерживая двигатель на требуемой скорости.
В этих небольших устройствах работает целый ряд технологий, описание которых выходит за рамки данного руководства. При покупке выбирайте ЭСК с номиналом постоянного тока не менее чем на 20% выше расчетного тока.


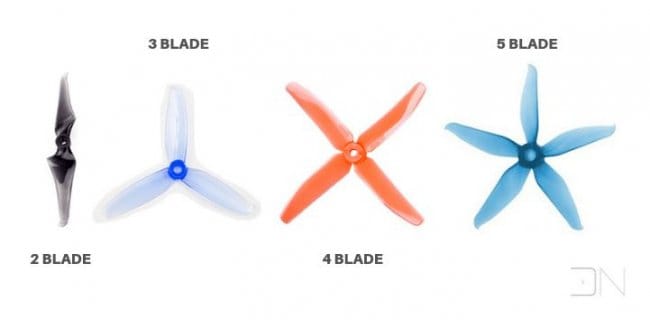
Пропеллеры.
Пропеллеры преобразуют механическую энергию двигателей в тягу. Размер и форма пропеллера играют огромную роль в эффективности полета.
Существует 2 типа форматов, используемых производителями: L x P x B | LLPP x B. Где L – длина, P – шаг, а B – количество лопастей.
Пропеллеры могут быть изготовлены из различных материалов, таких как пластиковые композиты, углеродное волокно, дерево и т.д. Каждый тип материала обладает уникальными свойствами, например, углеродное волокно и дерево очень жесткие и известны своей плавностью хода, в то время как некоторые пластмассы чрезвычайно прочны. Большинство пропеллеров, используемых в мини квадрокоптерах, изготовлены из пластиковых композитов.
Размер пропеллера, который вы можете использовать, ограничен размером вашей рамы, а также мощностью CV вашего двигателя. Как правило, чем больше винт, который вы можете использовать для создания определенной тяги, тем эффективнее он будет. Для мини квадрокоптеров они варьируются между 5-6″ пропеллерами с шагом 4-5″.
Количество лопастей влияет на тягу и потребляемую мощность. Чем больше лопастей, тем больше тяга и тем больше потребление энергии.

Батареи.
В большинстве современных беспилотников используются литий-полимерные батареи, широко известные как батареи Lipo. Аккумулятор, а также ESC и двигатель составляют силовую систему квадрокоптера.
Не думайте о батарее как о хранилище энергии, двигатели могут потреблять чудовищное количество ампер за очень короткие промежутки времени. LiPo аккумуляторы представляют собой набор элементов, каждый из которых рассчитан на напряжение 3,7 В. Если требуется более высокое напряжение, эти элементы могут быть соединены последовательно, образуя единую батарею. Батареи, соединенные последовательно, обозначаются буквой “S”, а соединенные параллельно – буквой “P”.
Чем больше последовательно соединенных элементов, тем выше напряжение, а чем больше параллельно соединенных элементов, тем выше емкость.
Например:
1S = 1 ячейка = 3,7 В
2S = 2 ячейки = 7,4 В
3S = 3 ячейки = 11,1 В
4S = 4 ячейки = 14,8 В
5S = 5 ячеек = 18,5 В
6S = 6 ячеек = 22,2 В
Емкость выражается в миллиамперах или “мАч”. Это количество ампер, которое батарея может выдать за один час. Например, аккумулятор 3S 2000mAh может выдавать 2A в течение 1 часа. Таким образом, если квадрокоптер потребляет 20 А, он будет летать в течение 2/20 * 60мин = 6 минут.
Номинальный разряд указывает на максимальную скорость, с которой ток может быть извлечен из батареи. Он обозначается цифрой “C” в верхней части. Чем выше коэффициент C, тем больший ток может выдать батарея.
Например, батарея 2000 мАч 25C может выдать до 2000×25 = 50 000 мА или 50 А.



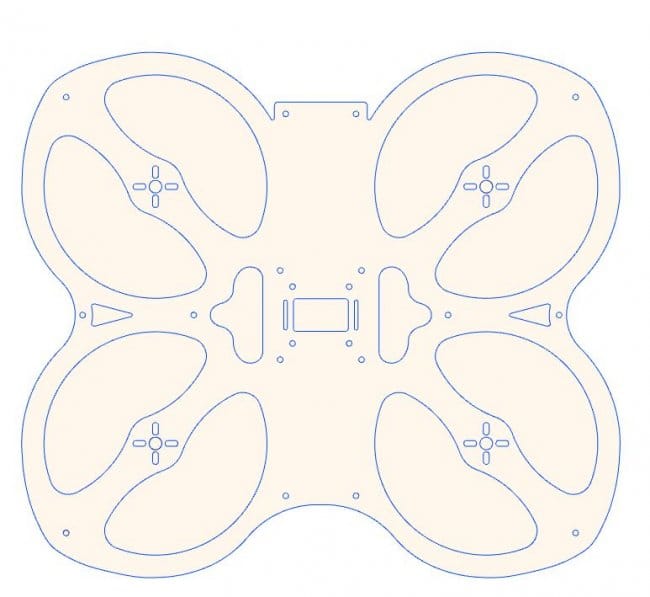
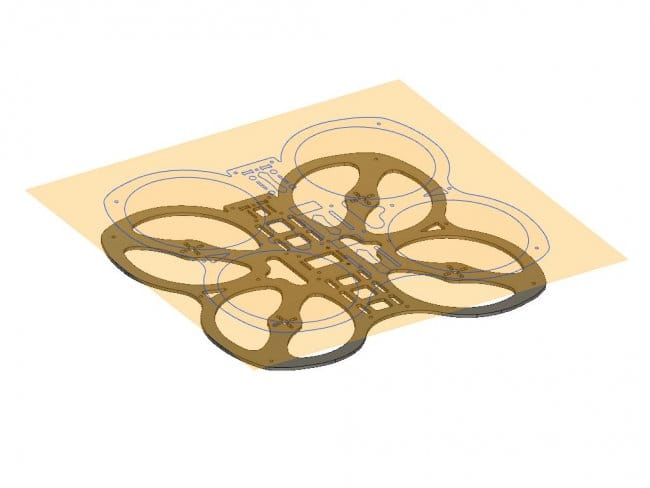
Шаг второй: проектирование и сборка рамы
Дизайн рамы был вдохновлен формой бабочки-монарха. При взгляде сверху рама выглядит как два крыла.
Мастер нарисовал проект в Fusion 360 и Rhino CAD. Размер рамы составляет приблизительно 230 мм, это основано на диагональном расстоянии от одной втулки двигателя до другой. Наиболее распространенные размеры рам – 210 мм, 250 мм и т.д. После того как вы определились с размером рамы, нарисуйте крепления двигателя.
Центральный корпус – это место, где будет установлена вся электроника, включая полетный контроллер, приемник, аккумулятор и т.д. E. В центральной точке имеются 4 отверстия M3, расположенные через каждые 30,5 мм.
Деталь изготовлена методом лазерной резки. Если у вас нет резака, его можно вырезать в мастерской. Файл для резки можно скачать ниже.
Файл design.rar










Шаг третий: сборка
Теперь квадрокоптер нужно собрать.
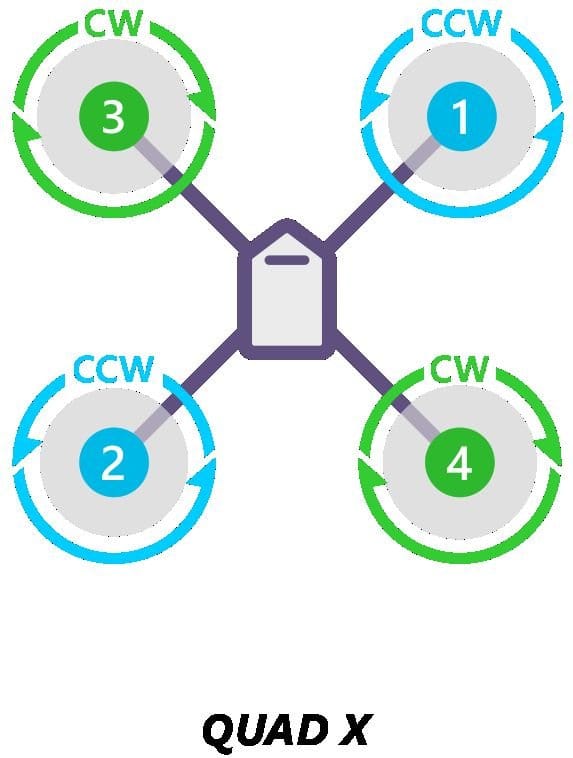
Сначала необходимо прошить контроллер прошивкой Betaflight. Затем откалибруйте датчик. Подключите радиомодуль и проверьте его работу. Прикрепите двигатели к раме в соответствии со схемой Х-образной рамы с правильным направлением вращения. Припаяйте провода двигателя к контактам ESC и прикрепите ESC к кронштейну. Установите плату распределения питания и припаяйте контакты ESC. Подключите Soler XT60 к кабелю питания, а затем к щиту распределения питания. Прикрепите контроллер. Подключите провода от ESC к полетному контроллеру. Прикрепите приемник к раме. Установите верхнюю крышку на место.
Я приобрел все детали здесь1 и здесь2.
Как собрать квадрокоптер ZMR250 / QAV250 с Aliexpress (часть 1)
В настоящее время в интернете есть несколько полезных руководств (все ссылки приведены в конце статьи) о том, как самостоятельно собрать 250-каркасный дрон. Однако, собирая свой первый квадрокоптер по этим статьям, я столкнулся с проблемами, которые никак не были описаны. А именно, я не нашел полного списка необходимых мне деталей и аксессуаров, цену полной сборки, а также некоторые практические и теоретические вопросы. Поэтому было решено создать эту статью в форме краткого изложения моего личного опыта и опыта других людейчтобы помочь новичкам (таким как я) построить свой первый дрон как можно более продуктивно.
Часть 1 будет посвящена выбору деталей, оборудования, сборке и соединению всех узлов вертолета. Программная часть будет рассмотрена в части 2.
Сразу же отчет о том, что я получил:
На видео видно, что во время полета у дрона отсутствуют ноги, но об этом подробнее позже.
Список часто задаваемых вопросов:
В: Не проще ли купить готовый квадрокоптер и летать на нем?
ОО : Это проще, если вы не хотите строить другие дроны. То есть вы просто хотите летать, а не ломать голову и тратить дорогое время. Магазинный дрон в любом случае проще в освоении и управлении. В качестве альтернативы я могу предложить MJX Bugs 3. Отзыв о нем здесь. Цена от
ВНужно ли его припаивать?
ОДа, это так!
ВВ Дешевле ли построить квадрокоптер самому, чем купить его в магазине?
ОНет, я думаю, что это заблуждение. Если вы новичок и читаете эту статью, вам наверняка понадобится много других вещей, помимо деталей квадрокоптера. Ниже я привел список.
Список покупок:
Чтобы избежать хлопот по сборке основных компонентов, я вижу отличную альтернативу в покупке готового набора. Не тратя время на подбор деталей, вы получите все необходимое.

Все, что вы получаете в комплекте. На картинке не На рисунке не показана проводка от контроллера к передатчику.
4000 PIPE.
1.1 Рама
1.2 Коммутаторные двигатели Marspower MX1806 2280KV 12V
1.3 Контроллеры серии Emax Simon K на 12A
1.4 Распределительная коробка питания и кабели
1,5 полетный контроллер CC3D (мой выбор NAZE 32 FULL. Я купил его отдельно, так как CC3D из комплекта перегорел. Нет никакой разницы в настройке CC3D и NAZE 32 FULL. Вот интересная статья о контроллерах полета).
1.6 Подключение проводов от контроллера к передатчику
1.7 4 гребных винта (2 левых, 2 правых)
1.8 Винты и болты с внутренним шестигранником. Не знаю, как другие, но я получил 4 одинаковых торцевых ключа для завинчивания двигателей, но ни одного для затягивания винтов на раме.

Приемник и передатчик Turnigy 9X
2) Turnigy 9X 9Ch радио пульт дистанционного управления + приемник (все в одном пакете)
ВПочему именно этот?
ОО: Во-первых, 9 независимых каналов, так что много возможностей на будущее. Во-вторых, у меня есть огромное количество информации по тюнингу и прошивкам. Очень популярная модель среди моделистов. Однако, если вы хотите заняться чем-то ОЧЕНЬ серьезным, я предлагаю Turnigy 9XR или 9XR-Pro.
В: Могу ли я купить более дешевую модель?
ОДа, это полностью ваш выбор. Я не рекомендую покупать оборудование меньше, чем 6 каналов, потому что вам все равно придется переключать режимы полета в дополнение к управлению. Вы можете приобрести готовые комплекты с фурнитурой, как, например, этот.
3) Как минимум 2 дополнительных комплекта пропеллеров (в комплекте 4 пропеллера: 2 левых, 2 правых)
Пропеллеры являются расходным материалом при первом полете, поэтому лучше запастись ими впрок. Это может показаться странным, но заказ из Китая стоит дороже, и вам придется долго ждать. Максимальный диаметр составляет 5″. Я купил их здесь.

Аккумуляторы с Aliexpress. Оба они потерпели неудачу. Левая отказала во втором банке, а правая – в третьем.

Слева: Батарея для радиопульта дистанционного управления со штекером JR (черная головка). Справа: Аккумулятор для питания квадрокоптера
4) По меньшей мере 1 батарея для питания квадрокоптера, предпочтительно 2
ВПочему два? Разве вам не достаточно одного?
О: Да, недостаточно! Аккумулятора хватает примерно на 10-12 минут полета, а на зарядку уходит 1-2 часа, поэтому я советую вам взять пару и продолжать полет, а не идти на зарядку. Обратите внимание на обозначение батареи, об этом можно прочитать здесь.
Я настоятельно не рекомендую покупать батареи из Китая: обе батареи, которые я заказывал, вышли из строя, т.е. перестали выдавать требуемое напряжение (одна банка вышла из строя). Возможно, это дело случая, но я никогда не сталкивался с подобными проблемами с другими батареями, и экономия в 150 рублей не стоила риска.

Turnigy 9X с аккумулятором. Очень хорошо сидит, крышка закрывается
5) Батарейка пульта дистанционного управления.
1199 руб.
ВЯ уже купил две. Вам нужен еще один?
ОО: Совершенно верно. Для передатчика требуется специальная слаботочная батарея.
Стандартный пульт дистанционного управления поставляется с держателем для батареек, что не подходит для частых перелетов. Позвольте мне объяснить: батареи быстро теряют напряжение, зарядка является проблемой, а стоимость высока. Также стоит обратить внимание на то, имеет ли аккумулятор разъем JR. В этом случае вам не нужно будет ничего перепаивать. Кстати, если вы собираетесь купить еще один аккумулятор (не такой, как у меня), не поленитесь и возьмите с собой пульт, чтобы опробовать его на месте. Мой с трудом помещается в стандартный отсек, но крышка закрывается.
6) Зарядное устройство iMAX B6
iMAX B6 позволяет равномерно заряжать батареи благодаря балансировочному разъему. Самое популярное зарядное устройство.
ВКак его использовать? Какой режим мне выбрать?
О: Ответы здесь.
7) Переходник с XT-60 на Т-коннектор
Если вы используете для питания квадрокоптера те же аккумуляторы, что и я, вам понадобится адаптер для зарядки, поскольку в стандартном комплекте iMAX B6 его нет.
8) Индикатор напряжения для литий-полимерного аккумулятора 1-8 банок
Эта штука покажет вам напряжение на всех батареях и уведомит вас, когда заряд упадет ниже заданного уровня, так что коптер не упадет, а батареи будут жить долго. Видео как использовать.
9) Зажим для батареи Tarrot 300 мм (2 штуки в комплекте). Эластичный ремень 22*200 мм для крепления камеры.
Крепления и ремни – это сугубо личное дело каждого. Способ крепления аккумуляторов и камеры ограничивается только вашей фантазией. Обратите внимание на размеры ремней.

4 винта на 16 мм вместо 8 мм
300 ТРУБОПРОВОДОВ.
10.1 20 шайб для болтов крепления рамы и двигателя. Идея заключается в том, что головки болтов маленькие и мешают раме, когда она затянута.
10.2 4 болта 16 мм вместо 8 мм. Я также смог использовать эти винты для крепления ножек, которые были напечатаны на 3D-принтере (видео для печати). Стандартные ножки сломались после одного жесткого приземления, я нашел альтернативу в печатных. В целом, высокие ноги полезны при взлете с земли или мокрой поверхности.
10.3 Термоусадка. Полезно для скрытия регуляторов
10.4 Пластиковые зажимы 10 см (9 шт.) Для крепления регуляторов
10.5 Двусторонняя клейкая лента, универсальная лента (скотч)
10.6 Винт и гайка для камеры. Полосы, напоминающие полоски – только ваше воображение.
10.7 Ленты. Подходит для крепления приемника, регулятора и распределительного устройства.

Защита для пропеллеров, 3D печать.
10.8 Дополнительно: защита гребных винтов. Я также распечатал его на 3D-принтере. Она пригодилась лишь однажды во время тестового запуска в комнате. После столкновения со шкафом он развалился на куски. Я больше им не пользуюсь. Кстати, отверстия на капоте не совпадают с отверстиями на раме. Вы должны сделать их сами или изменить модель на компьютере.
Я купил мелкие детали здесь1 и здесь2.
10) Сам паяльник.
Общая цена
11878 – 13217 руб.
Если вас удивил этот список, стоит отметить, что большинство купленных вами вещей будут служить вам долгие годы.
Я также хотел бы отметить, что цены постоянно меняются, поэтому я не могу гарантировать минимальную цену на ссылки. Я уверен, что вы можете найти более дешевые. Я делил источники только один на один со своими.
Монтаж
Сборка рамы
Возможно, что вы получите комплект деталей без инструкций по сборке рамы. Вот что случилось со мной. Если это так, то собирайте в соответствии с чертежом или видео. Не затягивайте все винты в “боевом режиме” на этом этапе, возможно, вам придется разбирать раму не один раз. На этом этапе не стоит вообще прикручивать верхнюю часть, удобнее работать с внутренностями коптера без нее. Также не забудьте про прокладки, о которых я писал выше.


Не забудьте про шайбы. Конечно, у вас нет белой пластины – это остатки 3D-печатных сплавов.
Сборка двигателей
Очень простая операция, если запомнить направления вращения двигателей. Решите, где будет располагаться фронтон. Установите двигатели с черной гайкой, вращающейся по часовой стрелке, спереди слева и сзади справа.

Обратите внимание на положение двигателей

Сборка двигателей
Паяльный сплав
Пайка приборной панели
Вы примерили его и решили, как хотите его закрепить. Теперь пришло время паять. При пайке платы самое главное – соблюдать полярность! Не имеет значения, куда вы припаяете провода, все зависит от того, как вы смонтируете плату.

Припаяйте регуляторы и провода питания. Обратите внимание на полярность печатных плат. (Мое предложение)

Припаяйте регуляторы и провода питания. Убедитесь в соблюдении полярности. (Мой вариант)
Припаяйте регуляторы к двигателям
Сначала мы удалим стандартный красный термостат из регуляторов. Чтобы убедиться, что двигатели вращаются в нужном направлении, припаяйте регуляторы к двигателям следующим образом:

Подключение регуляторов к двигателям
Я думаю, вам может быть интересно, где разместить длинные провода от регуляторов. Вы можете отпаять их и полностью удалить, или обрезать до нужной длины. Второй метод лучше подходит для начинающих, так как при пайке меньше вероятность перегрева регулятора.

Полностью отпаянные провода обычного регулятора. Я не рекомендую это делать, лучше просто укоротить провода (Не обращайте внимания на расположение проводов, фото сделано для того, чтобы показать другим. Правильная диаграмма находится сверху)
Припаяйте Т-коннектор. Полярность очень важна!
Почините силовую плату, регуляторы скорости
Время для сборки. Помните, что рама коптера проводит электричество, поэтому плата должна быть изолирована от нее. Я наклеила его с помощью двух слоев двустороннего скотча, закрепила зажим на одном краю, а затем прикрепила его резинкой.

Прикрепление платы. Два слоя двухсторонней клейкой ленты + зажим + резинка
Я спрятал регуляторы скорости в термоусадочный чехол, приклеил его на двустороннюю клейкую ленту, зажал стяжками и на всякий случай затянул резинкой. Он выглядит более чем надежным.

Ремонт регуляторов. Термоусадка + двухсторонняя клейкая лента + резинка.
Крепление полетного контроллера, приемника.
Снова используйте двухстороннюю липкую ленту и резинки. Опять же, чем плотнее вы его прикрепите, тем лучше.
Я сделал это следующим образом:

Прикрепление полетного контроллера (1). Трава, оставшаяся после аварии.

Ремонт полетного контроллера (2)
Монтаж приемника. Приемник также крепится с помощью двусторонней клейкой ленты.
Соединяем все проводами.
Контроллеры к полетному контроллеру
От каждого контроллера отходят 3 провода. Для этого отсоедините красный провод от разъема на трех из четырех контроллеров. Подключите провода к контроллеру в определенном порядке, это будет объяснено в следующем разделе.

На трех из четырех контроллеров отсоедините красный провод от разъема
Приемник к полетному контроллеру
Здесь порядок подключения проводов к отдельным каналам не имеет значения. Вам просто нужно правильно подключить кабель питания – белый кабель ближе к стороне с наклейкой.
Подключите приемник к полетному контроллеру. Кабель питания должен быть белым проводом ближе к стороне с наклейкой
Прикручиваем верхнюю часть рамы, смотрим, что получилось
Я также добавил “крепление для камеры”.

“крепление камеры”.
Ниже:


О каплях и о том, что делать в ожидании доставки
Сначала будьте готовы к нескольким каплям. А это сломанные пропеллеры, ноги и камера в моем случае.

Сломанные ноги.

Сломанная камера. Кстати, советую дополнительно запечатать слот с флешкой, есть вероятность потерять ее при падении.
А вот видео моего первого полета:
Чтобы избежать этого, я советую приобрести небольшой квадрокоптер для полетов в помещении. В период ожидания навыки управления значительно возрастут. Мой выбор пал на Syma X12S. Цена выпуска
Обещанные ссылки на статьи
Рад, что смог помочь! Также открыты для ваших комментариев и отзывов.
5) батарея
Выбирая аккумулятор, обратите внимание на выходную силу тока. Это число С (25С, 35С).
Не будем забывать, что по нашим данным система использует 48А.
Предположим, что имеется аккумулятор 3300mAh 3S 35C Lipo Pack
3300 мАч – емкость аккумулятора
3S – количество банков (один банк 3.7v)
35C – мощность тока. Таким образом, при 3.3Ah (3300mAh) x 35C = 115A
Что в основном покрывает наше энергопотребление. Даже чрезмерно. Чем больше C, тем тяжелее и дороже батарея.
Посмотрим, выдержит ли батарея с такой же емкостью, но 25C или нет: 3.3Ah (3300 mAh) x 25C = 82A
Ответ:Да.
Такая батарея будет легче и дешевле.
Вы можете приобрести нечто подобное для контроля состояния батареи.
gearbest.com/rc-quadcopters-parts/pp_137605.html
Imax B6 очень популярен для зарядки батарей, будьте осторожны, много подделок.
gearbest.com/rc-parts/pp_27704.html
И не забывайте об осторожном обращении с LiPo.
Мой совет: запаситесь хотя бы несколькими батарейками.
6) Доп. услуги. Оборудование.
– После того, как вы определились с дальностью полета и желаемой системой управления, можно переходить к выбору системы FPV:
FPV – буквально: вид от первого лица в реальном времени.
2,4 ГГц совместим с 5,8 ГГц
433 МГц совместим с 1,2 ГГц
В противном случае возникнут общие помехи.
Для моего 2.4gz я выбрал 5.8gz 200mw
gearbest.com/rc-parts/pp_27971.html
Система FPV состоит из:
1) направленная камера
2) Передатчик на квадрокоптере
3) Приемная станция на земле.
Для увеличения дальности связи стандартные антенны могут быть заменены на антенны типа “клевер”.
gearbest.com/rc-parts/pp_69370.html
Большинство передатчиков работают от 9-12 В, небольшой аккумулятор 3S сможет питать передатчик и камеру, подобранные под это напряжение.
Что означает 200 мВт?
Это мощность передатчика. Это напрямую влияет на дальность связи. На открытой местности с индивидуальными антеннами сигнал может приниматься на расстоянии до 1 км.
Учитывая, что моя система управления не способна преодолеть более 1,5-2 км, это идеальный вариант.
Для моих нужд.
Выбор приемника и передатчика уже понятен, но как выбрать камеру?
Выбор камеры изначально ограничен деньгами.
Существуют камеры, которые имеют функцию потоковой передачи и записи одновременно. Очень популярной является камера Мёбиуса.
gearbest.com/car-dvr/pp_145224.html
есть конкурент, который также имеет AV-выход
gearbest.com/action-cameras/pp_143378.html
Вы можете использовать курсовую камеру из самых дешевых, без корпуса. Стоимость, которой колеблется от 600 до 1000 рублей, и запись с хорошей экшн-камеры на подвесе.
В FPV-камере мы увидим количество ТВЛ. Что это такое? Это количество линий развертки. Для FPV-камеры достаточно 500-700ТВЛ. Важен минимальный уровень освещенности, этот параметр измеряется в люксах. 0,01 люкс достаточно для полета даже в вечернее время. Угол обзора не менее важен. Идеальный вариант – 100-120 градусов. Не помешает автоматическая коррекция яркости и автоматический баланс белого.
Изображение можно вывести на следующий монитор
gearbest.com/rc-parts/pp_117460.html
– Вы можете приобрести 2- или 3-осевое крепление для камеры. Это поможет вам повернуть камеру и получить более стабильное изображение, без рывков и дрожания.
Это дорогой вариант.
У меня есть вот такой: gearbest.com/rc-parts/pp_110479.html
– Естественно, сама встроенная камера gearbest.com/action-cameras/pp_77094.html
– Вы можете установить светодиодные фонари, звуковой сигнал, GPS-локатор
Создание квадрокоптера DIY. Часть 1 теория

Вы решили построить квадрокоптер? Является ли она для вас темной бездной? Не знаете, что делать? Эта статья специально для вас. Написано на основе личного опыта.
Часть 2
Я заинтересовался квадрокоптерами. Я решил заказать Habsan x4 с камерой 0,3 МП.
Мой мозг подскочил при мысли о том, чтобы собрать большой квадрокоптер с камерой 0,3R. В моем мозгу возникла идея построить большой квадрокоптер, я углубился в эту тему и прочитал множество статей. По мере возможности я отвечал на вопросы людей, которые являются членами группы Rc-моделирования: о выборе деталей и сборке квадрокоптера. Все это натолкнуло меня на мысль написать эту статью.
Принцип полета 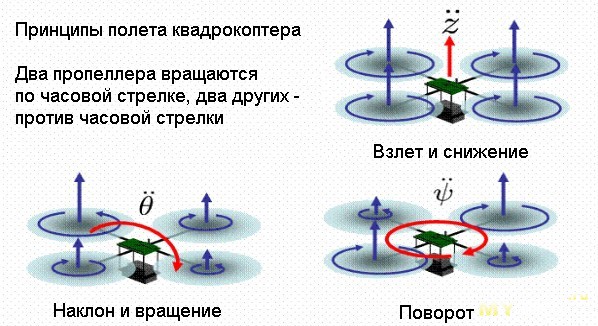
Итак, если вы решили построить свой квадрокоптер, вам необходимо определиться с бюджетом. Количество денег, которые вы готовы потратить на это чудо, зависит от размера. Наиболее распространенные размеры (в мм) – 250, 330, 450, 550 и больше.
*250 размер.: маленький, легкий, в основном используется только для FPV полетов.
*330 и 450 Золотая середина для бюджетного квадрокоптера. Приемлемый вес и цена конструкции.
*550 И еще больше можно отнести к профессиональным коптерам или мультироторам. Такие машины будут тяжелыми и дорогими. Для этих самолетов будут установлены мощные двигатели и они смогут нести приличный вес, вплоть до килограммов DSLR.
Я продолжу свое повествование на основе коптера масштаба 450.
Особое место в этой категории занимают рамы DJI 330 и 450, TBS Discovery. 
Их цена соответственно… высока.
Существует много клонов, я выбрал только этот. 
gearbest.com/rc-parts/pp_88914.html
Теперь пришло время узнать,что именно квадрокоптер и из чего он сделан.
1. рама
2. приемник/передатчик
3. полетный контроллер:
(a) АИОП
б) НАЗА
c) MuliWii
(d) HKPilot
(e) AMP
(f) Прочее.
(4) Двигательная система
(a) Двигатель
(b) Регулятор скорости
(c) Пропеллеры
5. аккумулятор
6. дополнительные услуги. Оборудование:
(a) Система FPV (вид от первого лица в реальном времени)
– Направленная камера
– Передатчик
– OSD
b) Подвеска боковой камеры
в) Освещение
Теперь мы можем рассмотреть все поближе.
1) Рама уже был взят. Шкала 450, клон TBS. 
2) Приемник/передатчик. Его выбор очень важен. Вы должны определить для себя: как далеко вы хотите улететь.
Наиболее популярными являются следующие варианты:
1,5-2 км обеспечит 2,4 ГГц
433 МГц даст вам 5-10 км (в зависимости от мощности вы можете пролететь до 20 км).
Для себя я выбрал 9-канальный FlySky Th9x 2.4GHz. 
Ссылка
Недорогое и простое в настройке оборудование.
Для квадрокоптеров требуется от 5 каналов.
Выбор этого оборудования обусловлен его популярностью, возрастом на рынке.Существует множество клонов.Много споров о том, какая компания была первой, та же turgiga 9, авионика и другие….. В Интернете можно найти множество адаптаций.
3) Полетный контроллер
В наши дни существует огромное количество полетных контроллеров для квадрокоптеров. Я сделал свой выбор. Это Naza Lite с GPS
www.banggood.comWybór этого оборудования объясняется его популярностью, возрастом на рынке.Существует много клонов.Много споров о том, какая компания была первой, та же turgiga 9, авионика и другие…. В Интернете можно найти множество адаптаций.
3) Полетный контроллер
В наши дни существует огромное количество полетных контроллеров для квадрокоптеров. Я сделал свой выбор. Это
Naza Lite с GPS
www.banggood.com/ru/DJI-NAZA-Flight-Control-System-and-GPS-Lite-Version-p-906572.html
Он не слишком дорог и очень прост в использовании. Naza требует минимальной настройки и очень проста в использовании.
С контроллерами AIOP, Crius и MultiWii это будет во много раз сложнее, особенно для новичка.
Почему я купил контроллер с GPS?
Эта функция необходима для зависания в точке и возвращения домой.
Я считаю, что это очень полезная функция.
4) Система привода
Для непосвященных это вызывает множество вопросов.
Используются двигатели BC. Они трехфазные (3 провода), их КПД составляет около 90%.
Для управления скоростью такого двигателя используется регулятор скорости (регулятор), который получает команды от полетного контроллера.
Рассмотрим рамы 330, 450 мм. В зависимости от ваших потребностей, вы должны оценить вес квадрокоптера. В среднем получается от 1к до 1,5кг. Желательно, чтобы тяга двигателей в 2-2,5 раза превышала общий вес. Это означает, что тяга должна составлять 2-3 кг. Разделите это на 4 и вы получите тягу одного двигателя: около 500-750 гр.
Возникает вопрос: какой двигатель выбрать? Смотрим на технические характеристики рамы: нас интересуют двигатели, которые можно в нее поставить. Первые две цифры должны представлять интерес: 22 или 28 в большинстве случаев.
Начните с выбора двигателя. Рядом с названием двигателя вы увидите конкретное значение, например: 1100 кВ. Это значение представляет собой количество оборотов на 1 вольт. Двигатели с более высокими значениями kv имеют меньшее число витков обмотки статора, чем двигатели с более низкими значениями kv. Это означает, что максимальный ток будет выше у двигателей с меньшим kv и большим крутящим моментом, поэтому можно использовать более крупные пропеллеры.
Его можно сравнить с коробкой передач в автомобиле. 380 кВ и 1400 кВ – это как первая и третья передачи в автомобиле.
380 кВ для медленных и длительных полетов с большой полезной нагрузкой 1400 кВ для быстрой и маневренной тяги.
Технические характеристики двигателя и результаты испытаний можно найти в Интернете или в описании двигателя. Выясните, какой максимальной силы тока (A) может достичь двигатель, и в соответствии с этим выберите регулируемый регулятор скорости (ESC). Предположим, что максимальный ток A для двигателя составляет 20A. Тогда ESC должен быть на 20-25% мощнее, 25-30A.
Теперь посмотрите на результаты теста.
Например
11×4.7 -3S-12A – 830гр.
Это означает, что
11×4.7 – характеристики гребного винта (11 дюймов, шаг 4.7)
3S – количество батарей LiPo
12A – ток в цепи для данной нагрузки
830g – тяга двигателя в заданных условиях
Таким образом, максимальная тяга 830×4=3300гр, максимальный ток в цепи 12×4=48А.
Максимальная сила тока необходима для выбора аккумулятора и жгута проводов.Для начала, не покупайте карбоновые стойки. Цена завышена. Учитесь летать на дешевых.
820
980
1400
Установка реквизита зависит от самого двигателя. Большинство пропеллеров поставляются с адаптером для оси двигателя. Возможно цанговое или резьбовое крепление. В DJI есть отличные варианты самоблокировки, с такой опцией ваш пропеллер никогда не открутится во время полета.
Для более простых вариантов я бы предложил дополнительно зафиксировать резьбовой герметик.
Обратите внимание
: вы можете сравнивать двигатели с разным kv при одинаковом размере. Например, EMAX XA 2212 поставляется в различных конфигурациях:
Вы можете сравнить их.
Эффективность двигателя 1400kv будет максимальной с пропеллером 8040,
Двигатель 820 кВ будет более эффективным с пропеллером 1147.
Двигатель 820kv будет иметь максимальный крутящий момент, поэтому имеет смысл использовать более крупные пропеллеры. Двигатель 1400 кВ будет любить высокие обороты при низкой нагрузке.
Разница между показанными двигателями заключается в обмотке.
Разумно использовать их именно так:
1400kv на раме 330 и пропеллерах 8040
980kv на раме 450 и пропеллерах 1045
820kv на раме 500-550 и пропеллерах 1147
Я выбрал gearbest.com/rc-quadcopters-parts/pp_154973.html
И гребные винты gearbest.com/rc-parts/pp_109432.html
Отличный набор.
Электрическая схема
Для простоты: Сигнал черный, Питание (+) красный
5) Батарея
При выборе батареи ориентируйтесь на ее амперную емкость. Это число С (25С, 35С).
Не забывайте, что по нашим данным цепь потребляет 48 А.
Предположим, что имеется пакет Lipo 3300mAh 3S 35C.
3300 мАч – емкость аккумулятора
3S – количество банков (один банк 3.7v) 35C – мощность тока. Итак, из 3,3Ah (3300mAh) x 35C = 115A
Что в основном покрывает наше энергопотребление. Даже чрезмерно. Чем больше C, тем тяжелее и дороже батарея.
Посмотрим, справится ли батарея с такой же емкостью, но 25C с этой задачей или нет: 3.3Ah (3300 mAh) x 25C = 82A
Ответ:
Да.
Такая батарея будет легче и дешевле.
Вы можете приобрести нечто подобное для контроля состояния батареи.
gearbest.com/rc-quadcopters-parts/pp_137605.html
Imax B6 очень популярен для зарядки батарей, будьте осторожны, много подделок.
gearbest.com/rc-parts/pp_27704.html
И не забывайте об осторожном обращении с LiPo.
Мой совет: запаситесь хотя бы несколькими батарейками.
6) Доп. услуги. Оборудование.
– После определения дальности полета и выбора системы управления можно переходить к выбору системы FPV:
FPV – буквально: вид от первого лица в реальном времени.
2,4 ГГц совместим с 5,8 ГГц
433 МГц совместим с 1,2 ГГц
В противном случае возникнут общие помехи.
Для моего 2.4gz я выбрал 5.8gz 200mw
gearbest.com/rc-parts/pp_27971.html
Система FPV состоит из:
1) направленная камера
2) Передатчик на квадрокоптере
3) Приемная станция на земле.
Вы можете заменить стандартные антенны на “клеверы”, чтобы увеличить дальность действия
gearbest.com/rc-parts/pp_69370.html
Большинство передатчиков работают от 9 до 12 В, небольшой аккумулятор 3S сможет питать передатчик и камеру, рассчитанную на это напряжение.
Что означает 200 мВт?
Это мощность передатчика. Это напрямую влияет на дальность связи. На открытой местности с индивидуальными антеннами сигнал может приниматься на расстоянии до 1 км.
Учитывая, что моя система управления не способна покрыть более 1,5-2 км, это идеальный вариант.
Для моих нужд.
Выбор приемника и передатчика уже понятен, но как выбрать камеру?
Выбор фотоаппарата изначально сводится к деньгам.
Существуют камеры, которые могут одновременно передавать данные и вести запись, но они стоят гораздо дороже. Очень популярной камерой является камера Мёбиуса.
gearbest.com/car-dvr/pp_145224.html
есть конкурент, который также имеет AV-выход
gearbest.com/action-cameras/pp_143378.html
Вы можете использовать направленную камеру из самых дешевых, без корпуса. Стоимость которого колеблется от 600 до 1000 рублей, а запись с хорошей экшн-камеры на высоте.
При использовании FPV-камеры мы увидим число TVL. Что это такое? Это количество линий развертки. Для FPV-камеры достаточно 500-700ТВЛ. Важен минимальный уровень освещенности, этот параметр измеряется в люксах. 0,01 люкс достаточно для полетов даже в вечернее время. Угол обзора не менее важен. 100-120 градусов – идеальный вариант. Автоматическая коррекция бликов и автоматический баланс белого не помешали бы.
Изображение может быть выведено на монитор следующим образом
gearbest.com/rc-parts/pp_117460.html
– Вы можете приобрести крепление для 2- или 3-осевых камер. Это поможет вам повернуть камеру и получить более стабильное изображение, без рывков и дрожания.
Это дорогой вариант.
У меня есть такой: gearbest.com/rc-parts/pp_110479.html.
– Конечно, сама встроенная камера gearbest.com/action-cameras/pp_77094.html
– Можно установить светодиодные огни, звуковой сигнал, GPS-локатор
Как вы поняли, создание такого БПЛА требует определенных инвестиций. Цена приблизительно находится в диапазоне 400-500 долларов.Данный обзор предназначен для новичков и несет в себе теорию, скоро будет продолжение.Со сборкой и настройкой.
Я запланировал серию статей и не буду торопиться с их завершением. 
Я с радостью приму критику,
и спасибо
за вашу проницательность.
Я открою свои карты: конечный результат

Как вы собираете нечто подобное и поднимаете в небо?
Инструкции будут в следующем разделе)
Мы не ищем легких путей. Дедушкин гараж, aliexpress и свалка электроники – вот наш выбор. Путь через испытания, трубы ПВХ и хардкор, но в итоге мы получаем полностью самодельный квадрокоптер. Здесь есть простор для фантазии, а все необходимые детали и схемы квадрокоптеров можно найти в Интернете.
Инструкции по самостоятельной сборке квадрокоптера (для начинающих)

Теперь мы перейдем к тому, как построить квадрокоптер вашей мечты. Сразу оговорюсь, что это обобщенное руководство, и некоторые моменты могут отличаться. Я постараюсь систематизировать процесс, указать на основные моменты выбора и сборки.
Детали для сборки квадрокоптера.
Самостоятельная сборка квадрокоптера начинается с выбора компонентов. Это самый ответственный этап.
Компоненты рамы

Несущая конструкция коптера чрезвычайно важна. Его характеристики определяют, сколько дополнительной мощности у вас осталось. Чем легче рама, тем она дороже. Не стоит задумываться о прочности, если у вас нет планов построить квадрокоптер для массивных камер. Существует три основных типа рам – четырехбалочные, шестибалочные и восьмибалочные. В данном случае мы начнем с четырехлучевой схемы с одиночными двигателями (по одному двигателю на луч).
Рама также может быть оснащена складными балками, но это уже очень дорого и не очень нужно. Вы можете попробовать реализовать его самостоятельно.
Особенности при выборе компонентов
двигатели

Я советую вам выбирать двигатели с чуть большим количеством помощников, чем это необходимо. Во-первых, если вы приобретаете их в Китае, цена на них будет завышена. Во-вторых, это даст вам больше пространства. Например, если вам нужно добавить более тяжелую камеру или другой модуль, это не повлияет на летные характеристики.
Пропеллеры
Это довольно обширная тема. При выборе гребных винтов следует руководствоваться своими потребностями. Если это будет простой летающий дрон, можно смело использовать пластиковые. Если вы хотите получить действительно функциональный аппарат для аэрофотосъемки или спортивный мини-дрон (что не парадокс, ведь там каждый грамм на счету), имеет смысл использовать композитные материалы. И не будьте жадными. Переплата в размере 10 процентов может избавить вас от необходимости уравновешивать ее.
Пульт дистанционного управления и приемник

Логичнее всего приобрести пульт дистанционного управления, который поставляется вместе с приемником. В этом случае они будут сопряжены, и вам останется только подключить приемник к плате управления. Не выбирайте только пульт дистанционного управления. Как правило, приличные устройства с большим радиусом действия стоят около 1 000 рублей. Многие из них имеют множество функций, которые вы не сможете использовать. Например, переключатели режимов есть, но плата режимов полета их не поддерживает. Из-за этого вес и объем занимают бесполезные переключатели.
Контроллеры оборотов
Они характеризуются мощностью, катушками двигателя, внутренним сопротивлением, наличием реверса, точностью работы и множеством других устрашающих параметров. Если есть возможность, поищите набор двигателей с контроллерами. Если вы не хотите делать это таким образом, вам придется читать форумы и документацию. В принципе, если вы подбираете приемлемый тип двигателя и мощность, то шанс промахнуться минимален, но я этого не говорил. Двойная проверка.

Аккумулятор
Необходимое количество батареи рассчитывается с помощью калькулятора батарей. Он учитывает множество параметров, включая вес самого блока батарей. Опять же, я бы не советовал покупать дешевый. Он прекрасно горит, но слишком быстро. Если коптер является грузовым самолетом и оснащен мощными двигателями и другим высокомощным оборудованием, обязательно проверьте, достаточно ли заряда у аккумуляторов.
Камера
Это самое страшное. Не всегда нужна камера, но если она нужна, то выбирать ее следует тщательно. В качестве записывающей камеры лучше использовать экшн-камеру GoPro или ее китайские аналоги (они не намного хуже в качестве видео, а еще лучше “компа”). Вам нужно сосредоточиться на весе и угле обзора. С весом все понятно, а вот насчет угла я еще скажу.
- Вы хотите, чтобы камера запечатлела красоту мира, но не лучи коптера. Если вы промахнетесь и это произойдет, вам придется выбирать между двумя плохими вариантами.
- Опустите камеру так, чтобы она не касалась пропеллеров. Это, скорее всего, вызовет массу проблем при взлете и посадке, а также при маневрировании из-за смещенного центра тяжести.
- Переместите камеру вперед. Тоже проблема. Снова переместите центр тяжести (в этом случае можно попытаться уравновесить его с помощью батареи). Это утяжелит вашу шею, так как вам придется придумать очень прочное запирающее устройство. Иначе никакие бюджетные амортизаторы не помогут, а эффект желе гарантирован.
Вы можете попробовать использовать приблизительную формулу L= 2 * tg (A /2) x D, где:
L – площадь обзора камеры на расстоянии D
Α – угол обзора камеры
D – расстояние до объекта (в нашем случае до пропеллеров)
Вы получите диаметр круга, но поскольку камера снимает прямоугольное изображение, этот диаметр будет диагональю. После этого вы сможете приблизительно определить, касается ли он или нет.
Компоненты следует выбирать в зависимости от желаемого результата. Не нужно выбирать лучшее, если оно вам не нужно. Вы можете приблизительно оценить свою сборку с помощью калькулятора.

Китайские детали
Сразу говорю – покупать в Китае можно, но нужно подходить к делу гораздо серьезнее. Китайцы постоянно завышают технические характеристики. Поэтому нужно примерно понимать, как и что работает, и не обманываться их беспрецедентной производительностью и чудесным качеством. Короче говоря, можно, но с некоторым пониманием ситуации и на свой страх и риск.
Контроллер
Контроллер – это мозг вашего мультикоптера. Их можно разделить на два типа.
Универсальный: Например, DJI NAZA. Этот контроллер можно использовать абсолютно с любым устройством. Будь то квадрокоптер, гексакоптер или октокоптер. Он не предназначен для управления чем-либо конкретным. На него можно повесить множество устройств, он имеет множество функций и датчиков.
Есть и некоторые недостатки. Первый недостаток – это цена. Тот же DJI Naza-M V2 стоит 17 000 рублей. Второй минус – необходимость конфигурации. Для этого необходимо использовать специальную программу, написанную для контроллера. Там можно заменить и отрегулировать почти все, но это требует определенной работы, знаний и времени.
Специализированный: как в примере ниже. Он уже настроен для работы с конкретной коптерной системой. Конечно, это дает некоторое пространство, но вы не можете регулировать мощность каждого двигателя. Он недорогой и не делает многого. Это хорошее место для начала.
Мечта о полетах преследует каждого человека с детства. Редко кому не хочется оторваться от земли и устремиться в небо. К сожалению, люди не умеют летать на природе. Им приходится использовать специализированные летательные аппараты. Самостоятельная сборка квадрокоптера поможет вам приблизиться к этой мечте.
Диапазон применения
Квадрокоптер можно использовать для серьезных целей. Оснащенный видеокамерой и передатчиком, он может передавать воздушные изображения отслеживаемых объектов. Например, положение скота на пастбище или состояние крыш и высоких памятников.
Квадрокоптер также можно использовать для борьбы с лесными пожарами, обеспечивая обзор направления огня. Как правило, везде, где есть необходимость сделать панорамный снимок с высоты, это первый помощник. Сюда входят спасательные зоны и охота на людей.
Другие очевидные применения включают перенос грузов в воздухе. Дрон не боится плохих дорог или их полного отсутствия, а дистанционное управление позволяет использовать его в любых погодных условиях без риска для жизни пилота. Квадрокоптер с полезной нагрузкой
- Есть и неочевидные варианты использования квадрокоптеров. Например, в некоторых крупных торговых центрах этот тип дронов заменяет лампочки под потолком. Захват помещается в специальный держатель, после чего дрон вращается, откручивая лампу и перенося ее на землю. Вставляется вся лампа, которая с помощью машины поднимается обратно по воздуху и вкручивается. Результат – отсутствие опасности для персонала и выполненная работа.
- Независимо от размера и назначения, каждый беспилотник должен иметь раму, скелет, опорную базу. Готовые рамы должны быть просты в сборке, так как они поставляются с подробными инструкциями и всеми необходимыми крепежными элементами.
- Основные узлы и компоненты
- Для того чтобы дрон, хотя бы теоретически, мог подняться в воздух, а самостоятельная сборка квадрокоптера доставляла удовольствие, необходимо приобрести несколько подходящих компонентов:
- Полетный контроллер – “голова” будущего БПЛА, в которой размещены все основные датчики и программное обеспечение для обработки их показаний, а также команды, поступающие с пульта управления, которые контролируют скорость каждого двигателя. Это самый дорогой компонент, который необходимо приобрести для сборки квадрокоптера.
- Продвинутые моделисты сами изготавливают скелет из подходящих материалов (алюминий, пластик, дерево, карбонат или их комбинация). Если у вас нет инженерного опыта или знаний, если сборная рама вам больше по душе, или если у вас нет желания или времени самостоятельно проектировать квадрокоптер и его детали, сборные рамы доступны в широком диапазоне размеров.
- Лучше выбирать бесколлекторные двигатели, так как они немного дороже, но гораздо надежнее коллекционных. Полет требует больших оборотов, поэтому отсутствие коллектора положительно сказывается на долговечности. Купите как минимум 4 (или 8, если вам нужен октокоптер), с 1-2 запасными, если позволяет бюджет.
- Контроллеры двигателей – это платы, которые регулируют скорость каждого двигателя и питают его, они будут установлены на “балках” шасси. Их количество соответствует количеству двигателей.
- Пропеллеры или движители следует выбирать с особой тщательностью, так как их размер должен соответствовать размерам будущей рамы, как самодельной, так и покупной.
Плата распределения питания предназначена для распределения питания от аккумулятора к регуляторам скорости вращения двигателя. Как правило, каждая купленная рамка поставляется с небольшой платой, куда можно припаять входы от всех контроллеров, а затем аккуратно подать на них питание. При желании вы можете заказать более продвинутую версию основной силовой платы, если ваш квадрокоптер имеет специфическую компоновку.
Купить аккумулятор – один из самых сложных товаров. Тип подходящей батареи полностью зависит от назначения модели, которую вы собираете. Для высокоскоростных моделей лучше всего подходят небольшие батареи с высоким KV (обороты в минуту × вольт), в то время как для медленно движущихся пленочных машин приоритетным является соотношение емкости и веса, поскольку конструкция ни в коем случае не должна быть перегружена. Полезным дополнением является монитор состояния заряда батареи. Также необходимо специальное балансировочное зарядное устройство для выбранного типа аккумулятора (литий-ионного или литий-полимерного).
Пульт дистанционного управления с модулем приемника, который подключается к полетному контроллеру, чтобы вы могли управлять устройством. Тип пульта дистанционного управления определяет удобство управления и некоторые другие доступные функции.
- Дополнительные опции выбираются в зависимости от назначения будущего автомобиля. Например, дроны часто оснащаются стабилизаторами камеры для фотосъемки, а гоночные дроны невозможны без FPV (вид от первого лица).
- Для сборки необходимо несколько инструментов – отвертка для сборки каркаса, паяльник и, конечно, умение с ним работать.
- Отсутствие последнего легко восполняется во время сборки “верхним” навыком – наличием паяльника. И лучше использовать паяльники с тонким жалом.
- Здесь нет планов квадрокоптеров в полном смысле этого слова, да они и не нужны. Сборка из модулей устраняет эту необходимость. Когда речь идет о расходных материалах, все немного сложнее. Для сборки квадрокоптера своими руками вам понадобятся:
- Закрепите крепление так, чтобы ни один из винтов не ослаб от вибраций в полете.
Термоусадочная изоляция на каждой точке пайки.
Полимерные зажимы для крепления компонентов к корпусу. Герметик для печатных плат. – 10.08.18, 22:33
Банановые штекеры для двигателей.
Ничто не мешает вносить необходимые изменения и коррективы в конструкцию во время сборки или летных испытаний. Для этого лучше собрать октокоптер своими руками. При соблюдении осторожности и внимательности даже самые технически неграмотные любители могут построить летающий дрон. Более того, летные испытания впоследствии выявят все недостатки, которые будут устранены. В результате должен получиться отличный персональный дрон. Самое главное – четко представлять себе сценарий его использования.
- Это сообщение было отредактировано
- михадом
- Как построить квадрокоптер своими руками
- Как собрать квадрокоптер и настроить его своими руками из китайских деталей.

Применяются все правила форума;
Полезные темы: форум FAQ | Как скрыть изображения в спойлере;
Вместо “Спасибо!” использовать Если у вас менее 15 сообщений – нажмите на кнопку под сообщением, в котором вам помогли, и напишите благодарность;
Если нет куратора, модераторы заполняют заголовок темы. Используйте кнопку на сообщении, которое, по вашему мнению, должно быть добавлено в заголовок, чтобы связаться с модератором.
Технические характеристики
Квадрокоптер
Рама до 250 мм
Тип управления
Радиоканал, пульт дистанционного управления в комплект не входит
Диапазон регулирования
от 500 м (радиоканал)
Камера
Вид от первого лица (FPV)
Мощность
Аккумулятор 3S-4S Lipo – 10.08.18, 22:33
Максимальное время полета
7-30 мин
Сообщение отредактировано
михадом
Доброе утро всем. Я хочу построить квадрокоптер с максимальной производительностью. Я нашел много видео по сборке со ссылками на аксессуары, просто видео по настройке этих устройств. Но при сборке постоянно возникают мелкие проблемы, которые на деле оказываются пустяковыми и опытные блоггеры просто опускают их с глаз долой, но они озадачивают меня так, как опыта у меня нет ни у кого.Поэтому я решил создать тему по сборке квадрокоптера из китайских комплектующих, в которой было бы с кем посоветоваться и сложить накопленную полезную информацию аккуратно по порядку в шапку темы.
Сразу скажу, что у меня уже есть квадрокоптер SYMA X8HC, и я был им недоволен:
1 он имеет небольшую полезную нагрузку.
2 он немедленно отключается при потере соединения 3 медленное рулевое управление – 09.08.18, 20:31
4 нет FPV-камеры, конечно, есть другая версия с камерой, передающей сигнал по wi-fi, но ее дальность оставляет желать лучшего (конечно, это можно исправить, установив миниатюрную китайскую камеру с передатчиком)
Вы не сможете установить камеру gopro на кардан, а если и сможете, то время полета сократится с 7 минут до половины, а о динамике полета и говорить нечего.
Это сообщение было отредактировано
weatson
Я сам купил его у другого продавца,
Я взял его в качестве подарка себе на день рождения (все еще 6k). Это была пустая трата денег, мне нужен был повод, чтобы потратить столько денег, а день варенья раз в году, чем не повод? Расчет был на то, что приемник можно будет перестоить на другие системы, так как оборудование имеет память для различных настроек управления (лодки, машины, самолеты) и планируется летать не только на квадрокоптере, но и на модели самолета. Я вложился и взял более качественное оборудование, на мой взгляд, соответственно и дорогое. сначала примерно в два раза дешевле оборудование FlySky FS-i6X.
FS-i6 Технические характеристики:
Но смущает ассортимент оборудования.
Затем я наткнулся на видео, где в радиоаппаратуру устанавливали усилители и достигали дальности до 10 километров.